A random thought:
I think it would be interesting if there was an open-source chip, perhaps based upon RISC-V, maybe based upon cores from
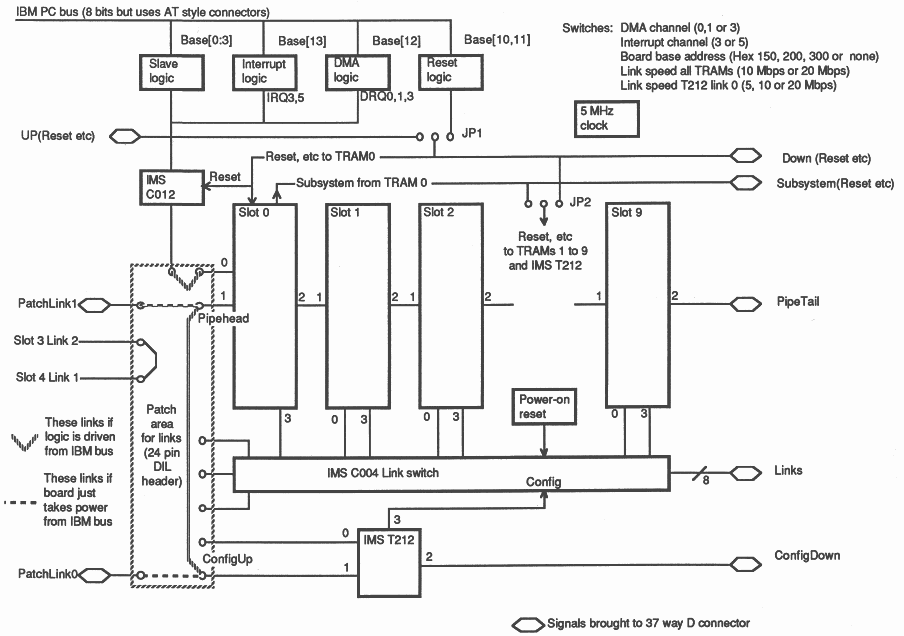
SiFive, which are as easy to wire together into a mesh network with little-to-no external glue logic, to make massively parallel computing a commodity. Think of it like an open source Transputer. The Transputer processors had 4 I/O buses which could each directly interface with other processors, peripherals or there was a switch.
Today, we should be able to do better. Imagine a processor module which has perhaps 64 interconnected cores per package and 8 I/O channels and perhaps a couple of gigs of DRAM.
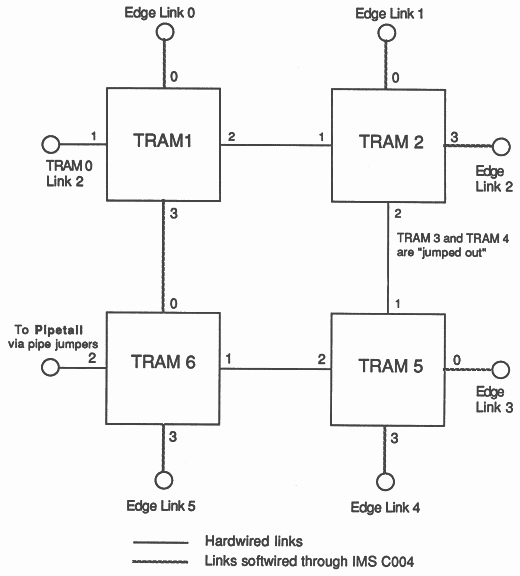
Hobbyists will then be able to experiment with different computing topologies:
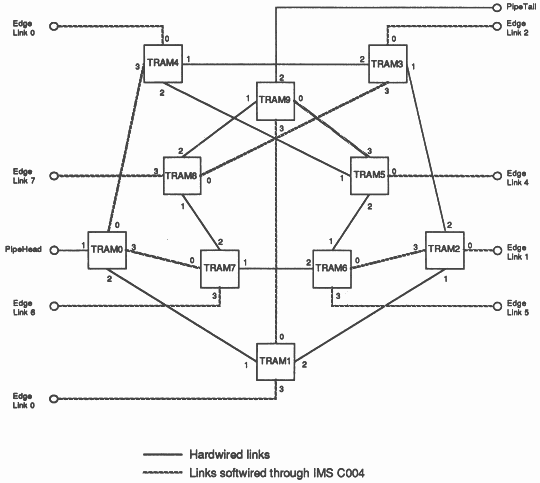
or even
What makes this interesting is that this has been a largely dormant area of computer science for more than 20 years and I think with the possibility of open silicon, there's a lot of exciting areas for research and hobby tinkering.